3D-Modellierung
- Abstraktion und Idealisierung von 3D-Objekten und ihren Eigenschaften
- Automatisierte Herstellung z.B. mit Bilddaten oder durch prozedurale Modellierung
- 3D-Modellierung bezeichnet Konzepte, Methoden und Verfahren zum Aufbau, zur Modifikation und zur Gestaltung von 3D-Modellen
Darstellungen
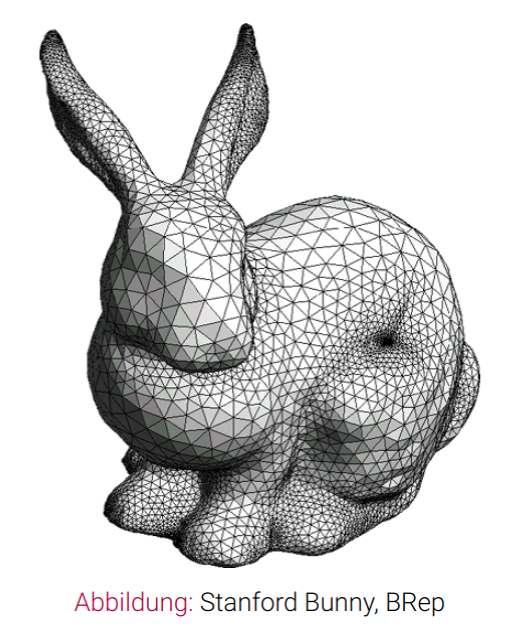
Boundary Represantations (BRep)
- Repräsentation der Oberfläche eines 3D-Modells
- Polygonsuppen (Polygon Soups) als einfachste Form
- Sammlung von Polygonen ohne garantierte Nachbarschaftsbeziehungen (ungeordnet)
- Grundlage für das Real-Time Rendering
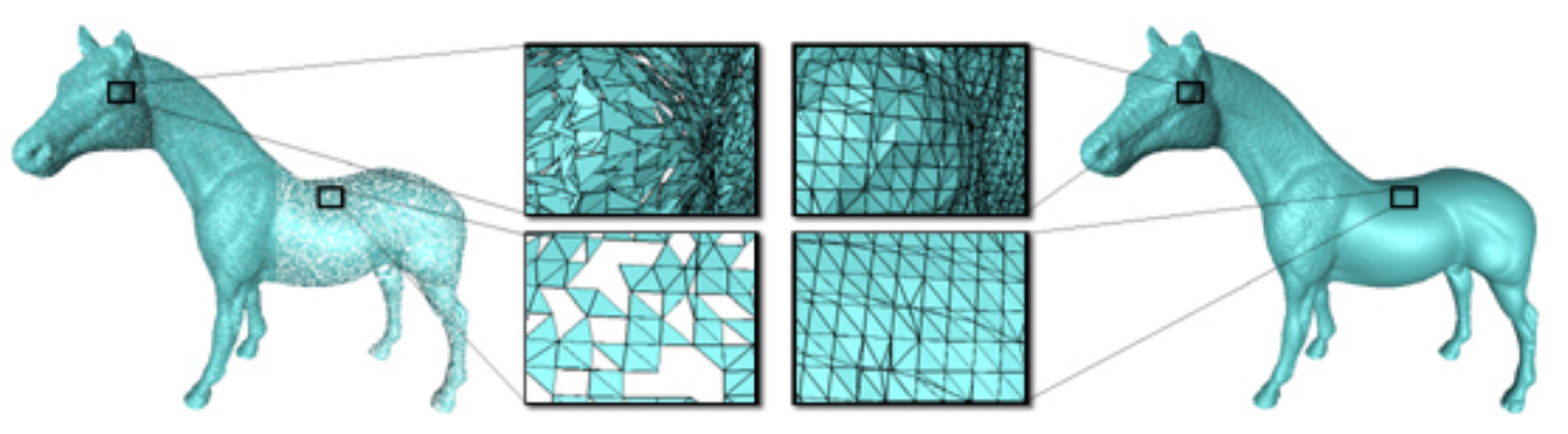
- Adaptive Triangulierung: Je stärker die Oberfläche gewölbt, desto feiner die Dreiecke
- Ein Dreieck lässt sich mithilfe eines Punkt im Inneren (z.B. Mittelpunkt) in drei Dreiecke zerlegen
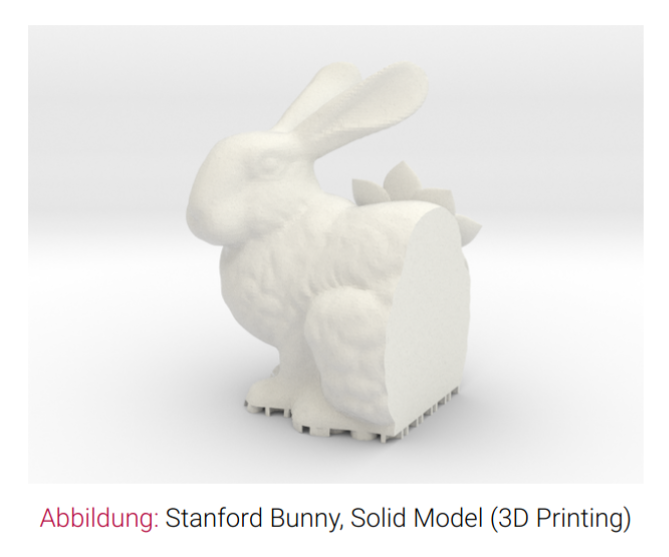
Solid Models
- Grundlage der 3D-Modellierung in CAD un CAM
- Repräsentation von 3D-Objekten unter Einhaltung geometrisch-topologischer Constraints (wohldefinierte, lückenlose Oberfläche)
- Eindeutig definiertes endliches inneres Objektvolumen
- Keine niederdimensionalen Bestandteile (z.B. einzelnes Polygon mit Nullvolumen)
Volume Models
- Repräsentation von Volumendaten durch ein Voxelraster
- Grundlage z.B. der medizinischen Visualiserung
- Großer Speicherbedarf durch Speicherung einzelner Schichten
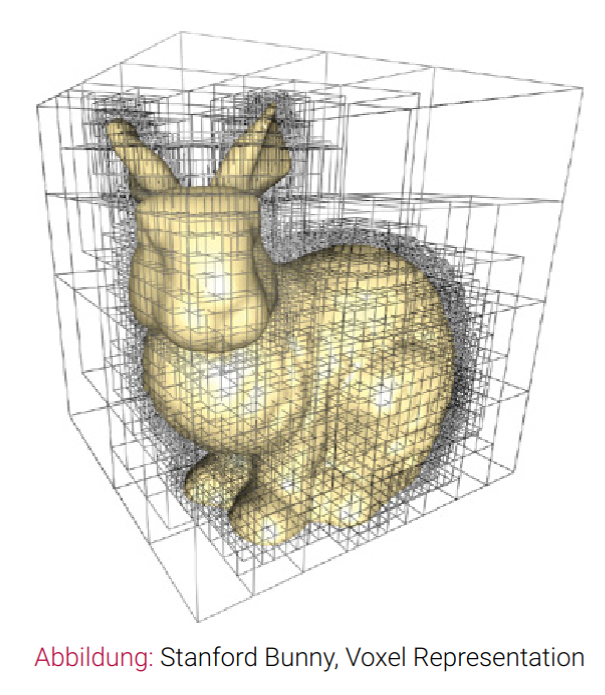
Image-Based 3D Reconstruction
- Repräsentation durch Kombination von 2D-Aufnahmen
- Grundlage für Modellierung realer Objekte (z.B. Scanning)
- Herstellung mit Hilfe photogrammetrischer Verfahren (z.B. Image Matching)
Kennzeichen von 3D-Repräsentationen
- Genauigkeit: Wie gut nähert die Repräsentation die Form und Erscheinung des modellierten Objekts an?
- Integrität: Wie weit kann die Repräsentation geometrische und topologische Eigenschaften sicherstellen und analysieren?
- Prozessierungseffizienz: Wie schnell kann die Repräsentation vom Rendering verarbeitet werden? Wie schnell können Operationen (z.B. Intersektion) auf der Repräsentation ausgeführt werden
- Speichereffizienz: Wie viel Speicher benötigt die Repräsentation?
- Herstellungseffizienz: Wie einfach ist die Übersetzung von Eingabedaten in eine Repräsentation?
Anwendungsgebiete
- 3D-Rekonstruktion: zum Beispiel Cultural Heritage (Laser-Scanning 3D-Punktwolken Oberflächenmodell)
- 3D-Assets: zum Beispiel im Produkt-Design oder Gaming
- 3D-Printing: Herstellung von 3D-Objekten
- Grundanforderung: Solidität
- Prototyping & Manufacturing
Geometrische Objekte
Linien
Linie: Eine Strecke / Liniensegment zwischen und
- definiert als
Strahl: Ein Strahl / Halbstrahl von aus in Richtung
- definiert als
Gerade: Eine Gerade durch und
- definiert als
Polygone
Sei eine geordnete Menge von Punkten aus dem .
Polygonale Kette: ein Weg , der aus einer endlichen Folge von Liniensegmenten aufgebaut ist
Polygon: für eine einfache, geschlossene polygonale Kette nennt man das umschlossene Gebiet zusammen mit selbst einfaches Polygon
Kanten: die zu einem Polygon definierten Liniensegmente
Ecken: die das Polygon definierenden Punkte
Diagonalen: alle Strecken zwischen den Ecken , die keine Kante bilden
- mit
Orientierung: o.B.d.A. kann das Innere eines Polygons dadurch definiert werden, dass es stets links von den geordneten Liniensegmenten liegt
Innenwinkel: Für zwei aufeinanderfolgende Liniensegmente und wird der Winkel zwischen den beiden Segmenten definiert als Drehwinkel, mit dem in rotiert werden kann
- Die Summe aller Innenwinkeln eines Polygons (mit Punkten) ist
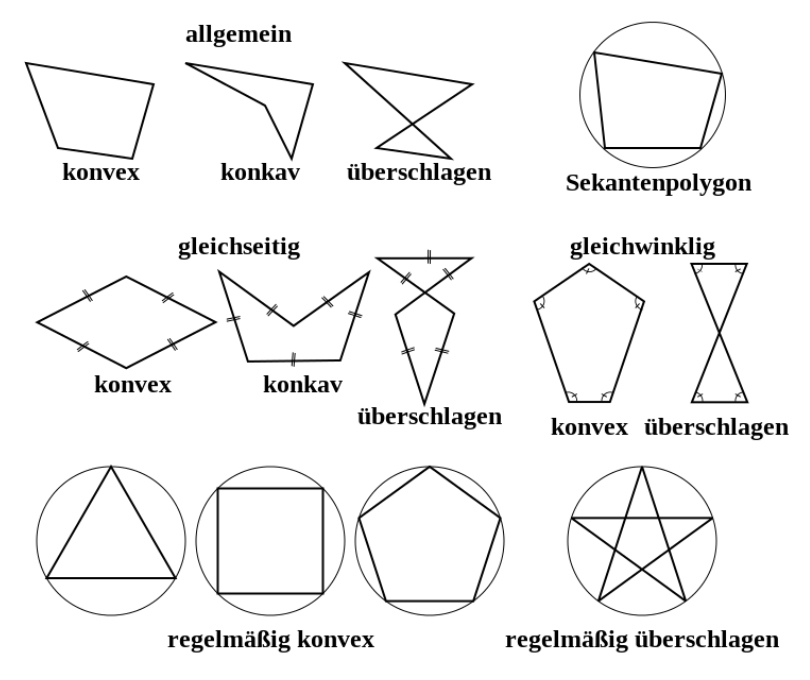
Polygoncharakteristiken
- Überschlagen: mindestens zwei Kanten haben einen Schnittpunkt im Kanteninneren
- Einfach: genau eine polygonale Kette, die selbstüberschneidungsfrei ist
- Komplex: nicht einfach
- Planar: polygonale Kette liegt in einer gemeinsamen Ebene des
- Konvex: für zwei beliebige Punkte aus dem Polygon oder Polygoninneren liegt die verbindende Strecke vollständig im Polygon
- kein Innenwinkel größer als
- der Schnitt endlich vieler konvexer Mengen ist konvex
- einfach
- Konkav: einfach, aber nicht konvex
- Sternförmig: es gibt einen Punkt im Polygon, vom dem aus das gesamte Polygon “gesehen” werden kann
- Regulär: Kanten gleich lang (gleichseitig) und Innenwinkel benachbarter Segmente gleich groß (gleichwinklig)
- Stern: planar, überschlagen und regulär (sieht aus wie ein Stern)
- Degeneriert: Polygon kollabiert ganz oder in Teilen zu einem Punkt / Linie, enthält Kanten mit Länge Null oder ist nicht planar
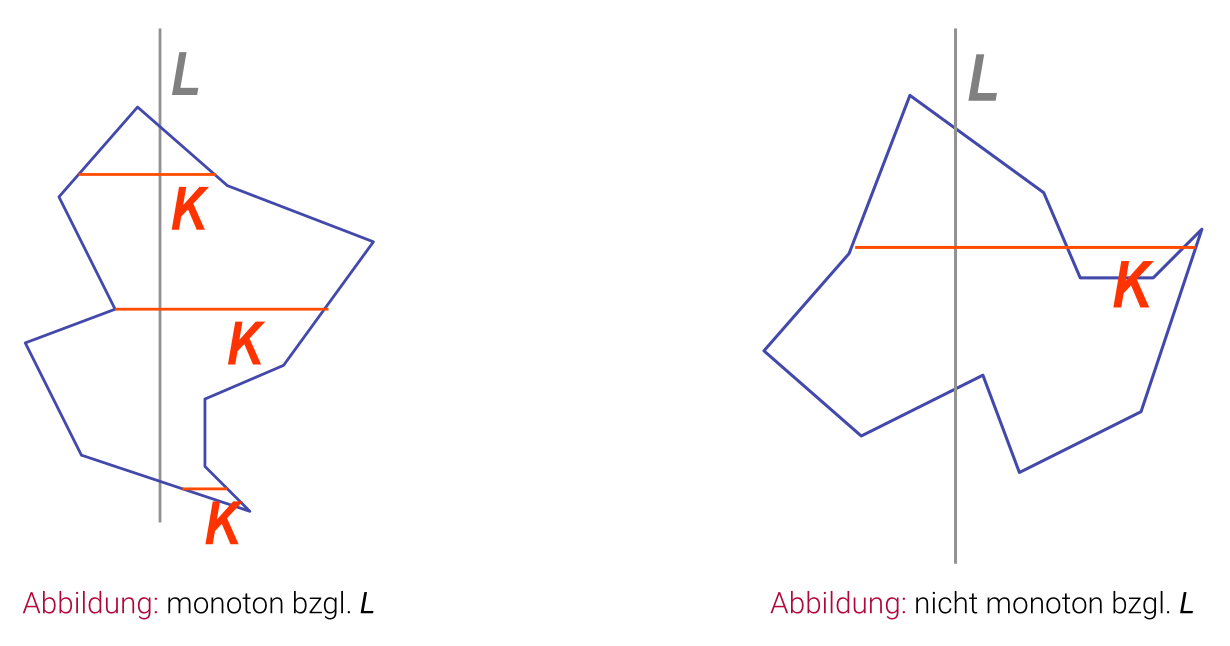
- Monoton bezüglich einer Linie : jede zu orthogonale Linie bildet mit dem Polygon eine Schnittmenge, die genau einem Liniensegment / Punkt oder der leeren Menge entspricht
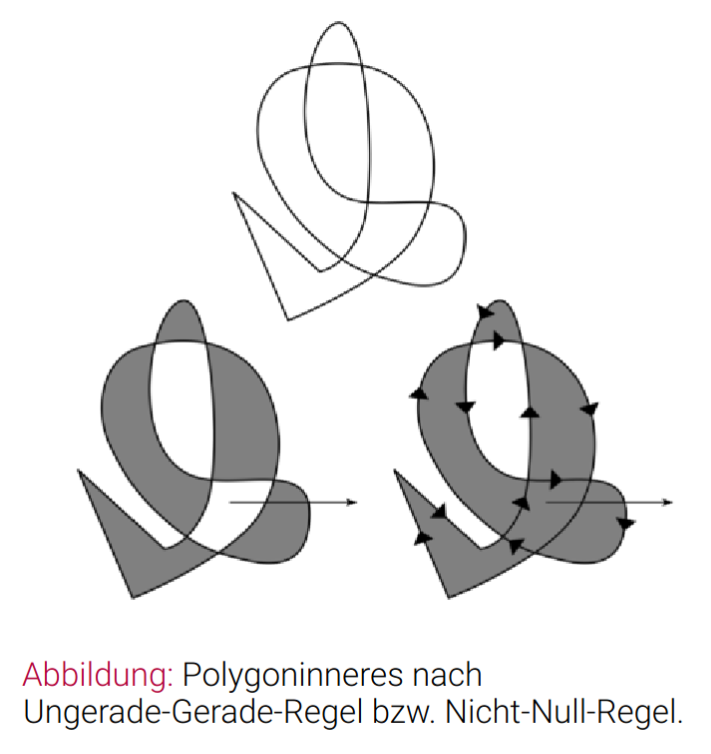
Bestimmung des Polygoninnern
- Ungerade-Gerade-Regel: virtuelle horizontal und parallel verlaufende Strahlen beginnen außerhalb des Polygons und invertieren bei jedem Kantenübertritt eine Flag, die mit initialisiert ist
- Innen bei Flag
- Nicht-Null-Regel: jeder horizontale Strahl inkrementiert einen Zähler dort um 1, wo die Polygonkante von oben nach unten den Strahl schneidet
- Innen bei Zähler
Boolsche Operationen
- z.B. Vereinigung, Schnittmenge, Differenz
- auf konvexen / monotonen Polygonen z.B. mit Sweep-Line-Algorithmen in linearer Zeit ausführbar
- nicht abgeschlossen. d.h. die Ergebnisse sind nicht notwendigerweise Polygone

Polyeder
Ein Körper, der durch ebene Polygone begrenzt wird
- regulär: alle Oberflächen bestehen demselben regelmäßigen Polygon und in jeder Ecke treffen gleich viele dieser Polygone zusammen
- Tetraeder, Hexaeder, Oktaeder, Ikosaeder, Dodekaeder (auch Platonische Körper)
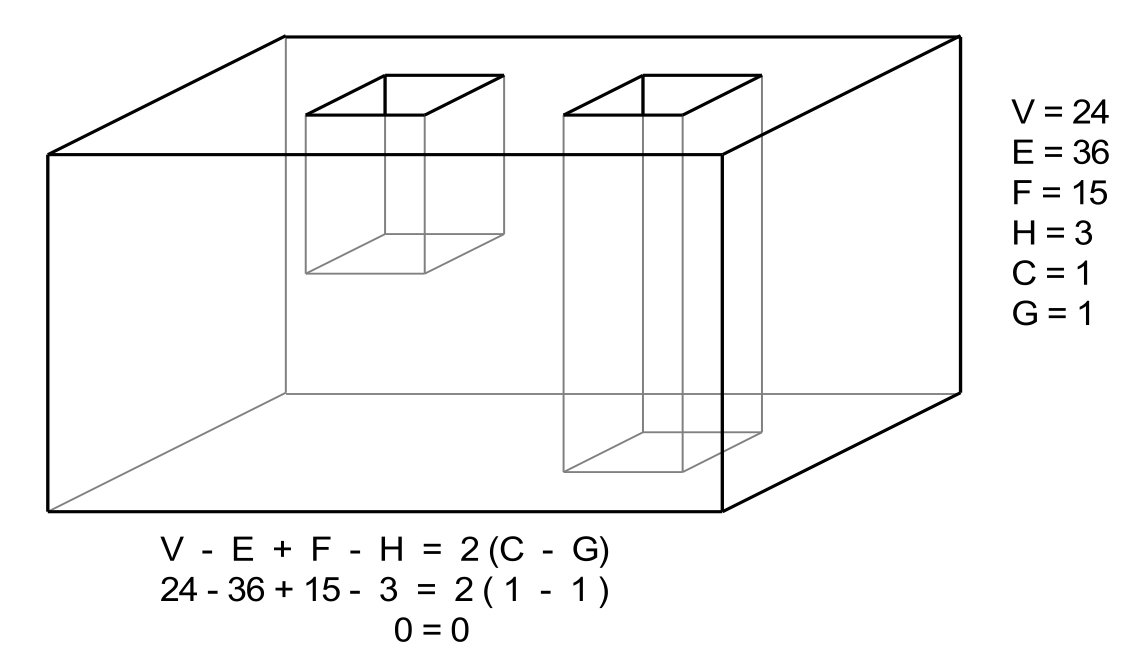
- Eulerscher Polyedersatz:
- Erweiterter Eulerscher Polyedersatz:
- Anzahlen: Ecken (vertices), Kanten (edges), Flächen (facettes), Löcher (in Flächen) (holes), Einzelteile (components), Löcher durch den Körper (*Genus)
Solid
Ein beschränkter, endlicher Teil des Raums, der durch Flächen eindeutig begrenzt ist
- endliches positives Volumen
- Oberfläche ist geschlossen, d.h. von außen gelangt man nicht in das Innere
- abgrenzende Flächen können polygonal oder kurvenförmig sein
- Basis von CAD/CAM-Werkzeugen
Ein Polyeder, das geschlossen, orientierbar und 2-mannigfaltig ist, ist ein Solid.
- Orientierbarkeit: Oberfläche kann eindeutig in eine Vorder- und Rückseite eingeteilt werden (Definition über Normalen)
- Möbius-Band / Kleinsche Flasche nicht orientierbar
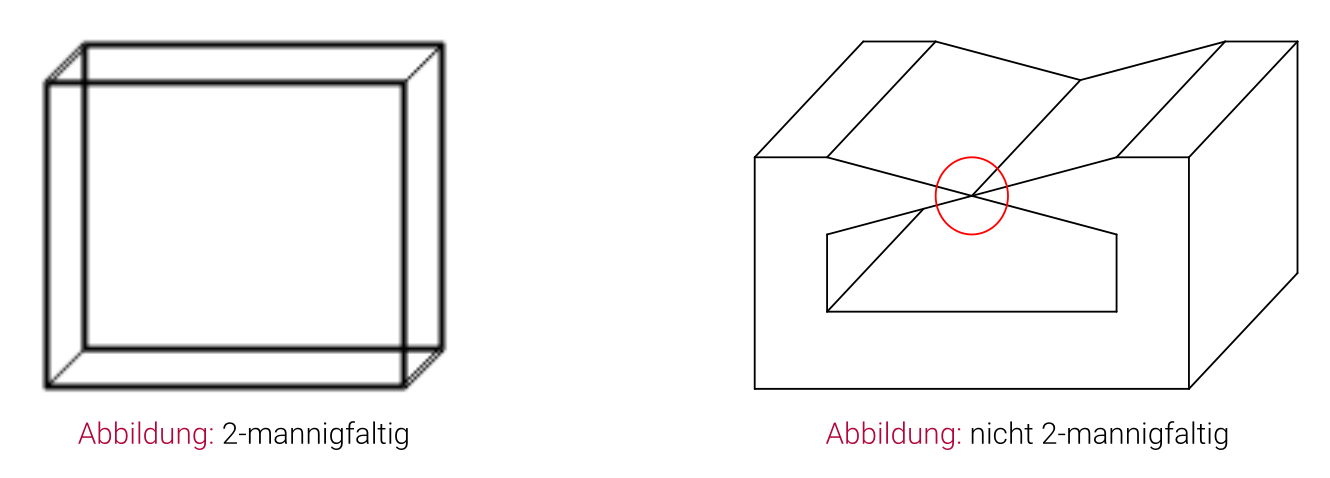
- 2-Mannigfaltigkeit: Zu jedem Punkt auf der Oberfläche (des Polygonnetzes) kann eine Nachbarschaft von Punkten gefunden werden, die topologisch einer Scheibe in der Ebene entspricht
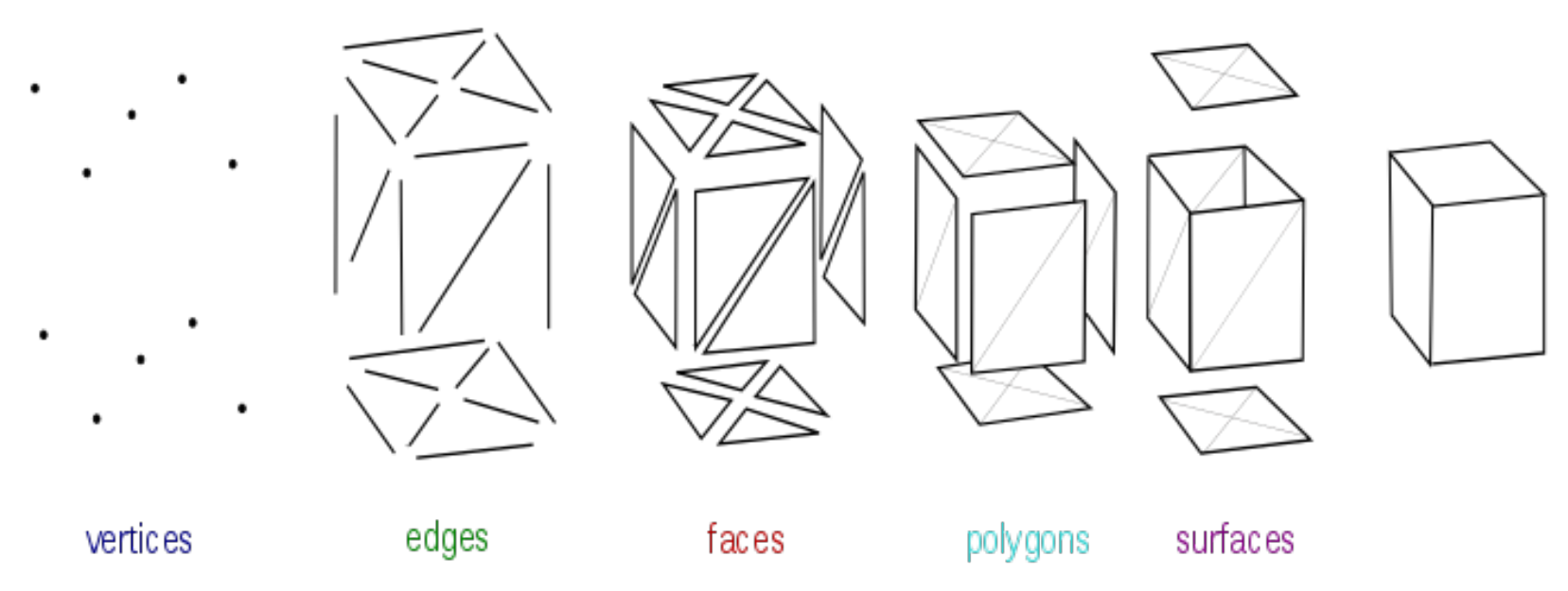
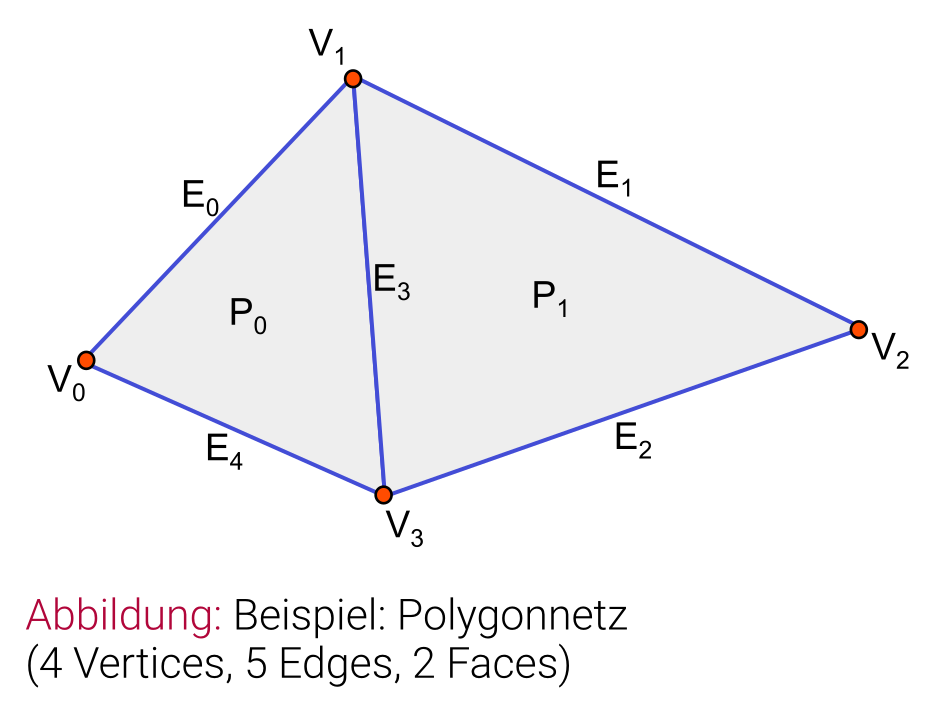
Polygonnetz
Ein Pologynnetz wird durch eine Menge von Eckpunkten (vertices), Kanten (edges) und Seiten (faces) definiert
- beliebig genaue Approximation jedwelcher Formen
- Stückweise glatte Oberflächen
- Effizientes Rendering durch GPU-Beschleunigung (triangulierte Polygonnetze)
Eigenschaften:
- Jede Kante verbindet 2 Eckpunkte
- Jede Kante gehört zu höchstens 2 Seiten
- Jede Kante gehört zu mindestens einer Seite
- Jede Seite ist spezifiziert durch eine Folge von Kanten
- Ein Eckpunkt ist mindestens 2 Kanten gemeinsam
- Die Seiten repräsentieren Abschnitte der Oberfläche
- Die durch die Seiten definierten Polygone sind im Allgemeinen konvex
Polygon Soup
Darstellung eines Polygonnetzes durch eine Menge von Faces , die jeweils durch eine Liste der Eckpunkte kodiert werden
- Eckpunkte werden redundant gespeichert
- Keine Information zu Nachbarschaftsbeziehungen enthalten
- Identifikation wird durch Ungenauigkeit von Floating-Point-Darstellungen zusätzlich erschwert
- 3D-Hardware-Unterstützung
- Keine Ordnung für die Polygone (willkürlich)
Face-Vertex Mesh
Darstellung eines Polygonnetzes durch eine Tabelle mit den insgesamt vorhandenen Eckpunkten und eine Menge von Faces , die jeweils durch eine Liste von Eckpunktindizes spezifiziert werden
- keine Redundanz bei Eckpunkten
- Erweiterung: im Vertexarray werden auch anliegende Seiten gespeichert
- Unterstützung durch 3D-Hardware (z.B. vertex arrays) weit verbreitet
- Geringerer Speicherplatzbedarf wegen gemeinsam genutzter Eckpunktliste
- Gemeinsame Polygonnetzkanten können nur durch explizite Traversierung gefunden werden
- Operationen teilweise ineffizient
Kantenlisten
Darstellung eines Polygonnetzes durch eine Tabelle mit den insgesamt vorhandenen Eckpunkten , eine Tabelle mit Kanten und eine Menge von Faces , die jeweils durch eine Liste von Kantenindizes spezifiziert werden
- Jede Kante hält Indizes auf den Anfangs- und Endeckpunkt sowie Indizes auf die Seiten, an der die Kante liegt
- Zahl der zu einer Kante gehörenden Polygone kann auf 2 eingeschränkt sein (Oberflächen entsprechen einer 2-Mannigfaltigkeit) bzw. uneingeschränkt sein für beliebige Oberflächen
- Nachbarschaftsrelationen und topologische Informationen effizient auslesbar
- Größerer Speicherplatzbedarf wegen der Kantenliste
- Keine Unterstützung durch 3D-Hardware
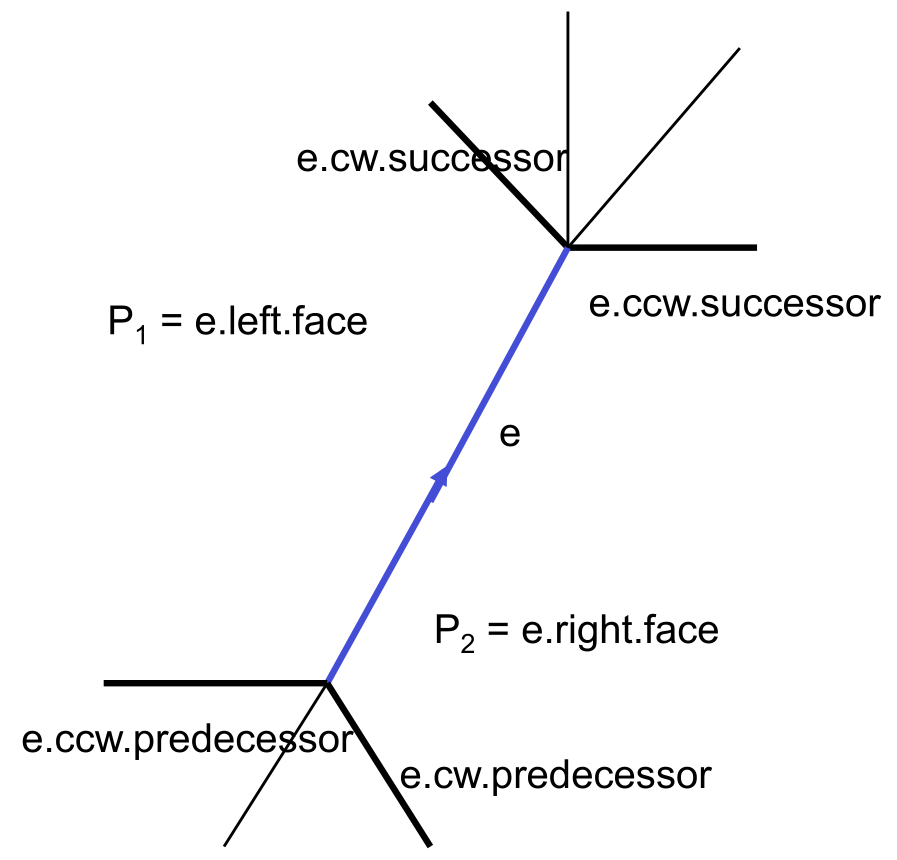
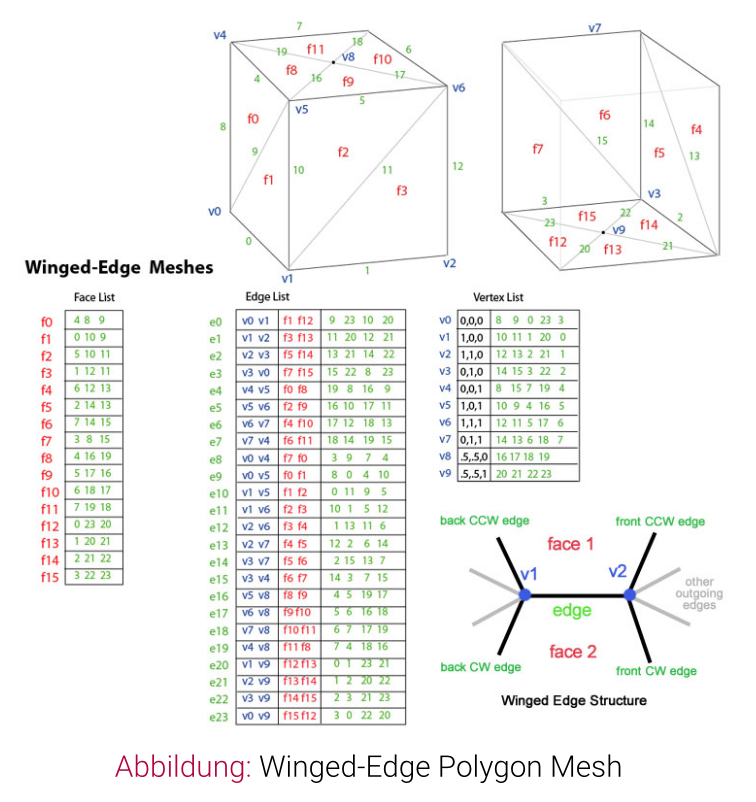
Winged-Edge Polygon Meshes
Repräsentation 2-mannigfaltiger Polygonnetze, navigierbar
- Kanten: Referenz auf Anfangs- und Endeckpunkt, Referenz auf angrenzende Seiten (rechts und links), Referenzen auf vier Folgekanten (jeweils erste clock-wise und counter-clock-wise dabei)
- rekursiv alle Kanten an einem Eckpunkt bestimmbar
- Eckpunkte: Koordinaten und Per-Vertex-Attributdaten, Referenz auf beliebige Kante, die den Eckpunkt referenziert
- Seiten: Indizes der Kanten, die das zugehörige Polygon definieren
- Aber: Keine GPU-Unterstützung, sondern Umwandlung in GPU-optimierte Polygonnetze nötig
Vorteile:
- Explizite Darstellung der Netztopologie
- Effizienter (d.h. direkter) Zugriff auf Nachbarschaftsbeziehungen: Einfaches Auffinden aller adjazenter Eckpunkte, Kanten und Polygone zu einem gegebenen Eckpunkt, zu einer gegebenen Kante oder zu einem gegebenen Polygon
Nachteile:
- Erhöhter Speicherbedarf
- Nichttriviale Implementierung der Datenstruktur
- Keine GPU-Unterstützung, d. h. GPU-optimierte Polygonnetzdarstellung muss abgeleitet werden (z. B. Dreiecksnetze)
- Einschränkung hinsichtlich der Oberflächenstruktur: Oberflächen mit Kanten, an die drei oder mehr Polygone angrenzen, sind nicht darstellbar
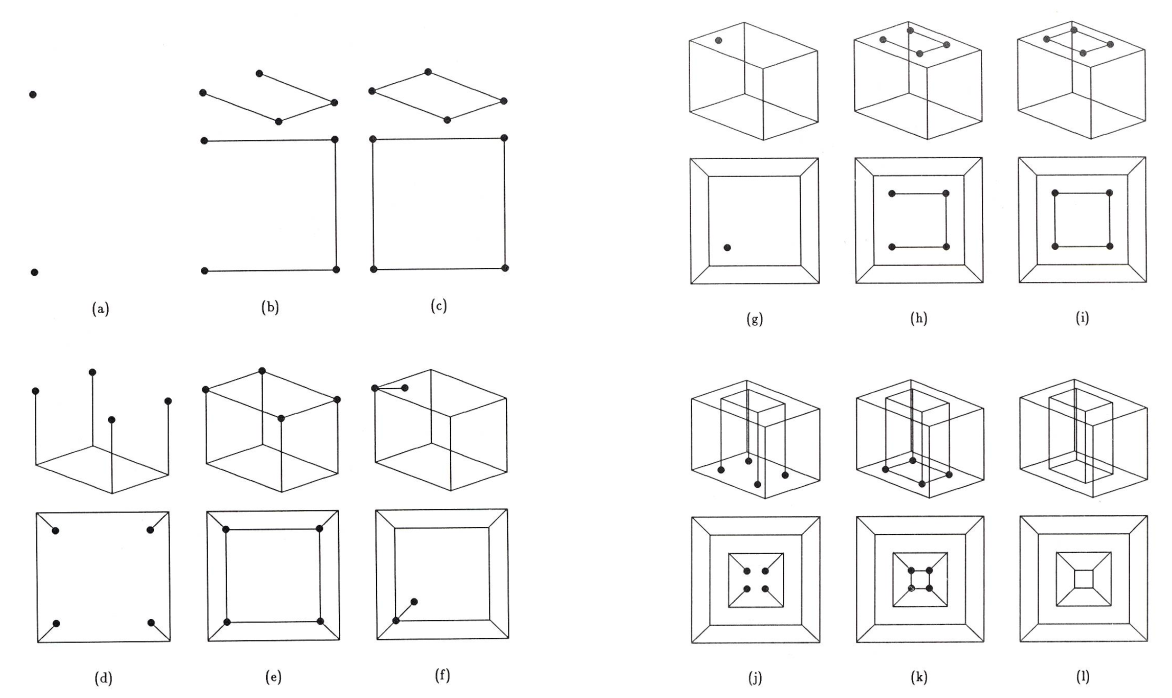
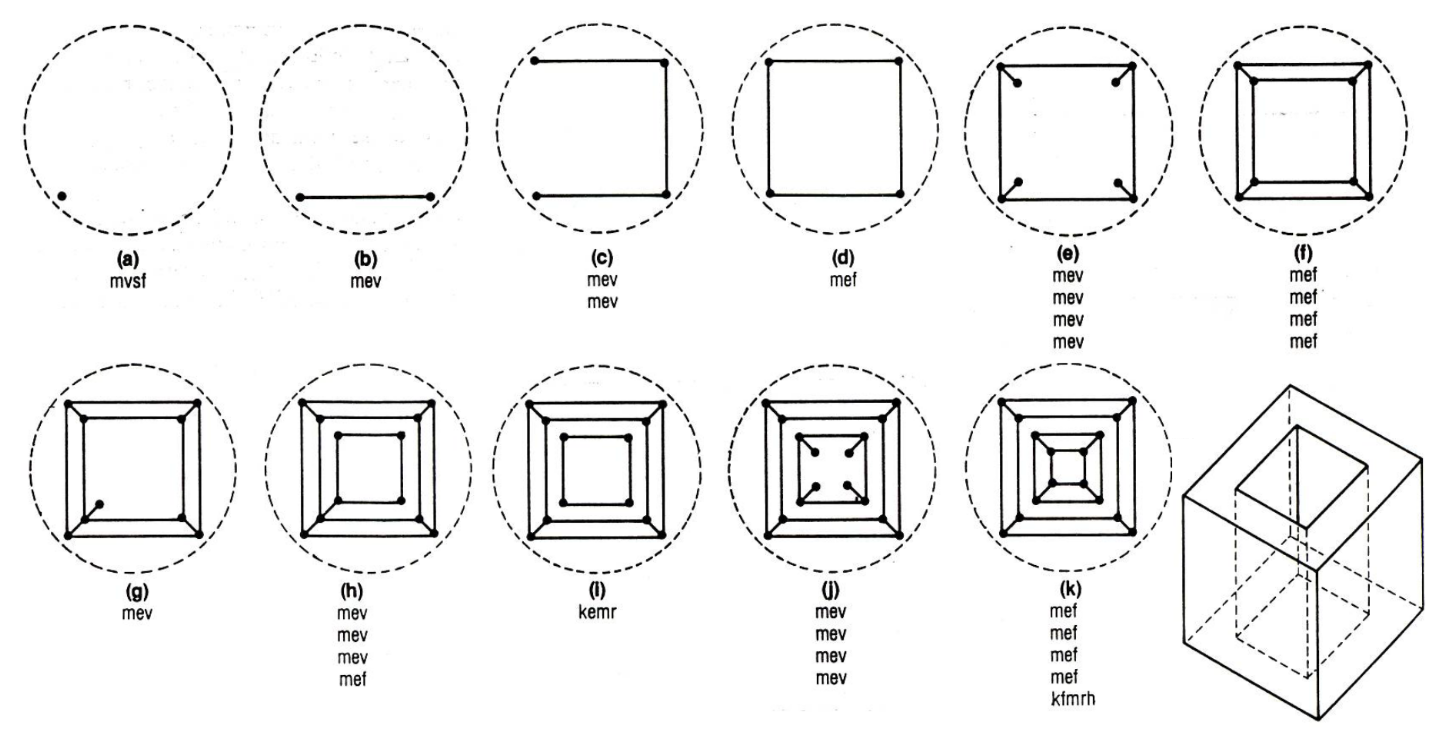
Halfedge Polygon Meshes
Erweiterung der Winged-Edge Polygon Meshes, wobei jede Kante in zwei gegenläufige halfedges zerlegt wird (mit Pointer aufeinander)
- Euler-Operatoren: Ausführung respektiert den Eulerschen Polyedersatz
- zum Beispiel: MSVG (make vertex, facet & shell), MEV (make edge & vertex), MEKL (make edge, kill loop), etc.
- wird zum Beispiel in CGAL implementiert
Vorteile:
- effiziente, feingranulare Datenstruktur für den topologieorientierten Aufbau von Polygonnetzen
- Systematische Operatoren für die Modifikation der Polygonnetze
- Grundlage für High-level Netzoperatoren
- De-fakto-Standard im Bereich Solid-Modeling
Nachteile:
- größerere Speicherplatzbedarf aufgrund der expliziten, doppelten Kantendarstellung
- Hoher Konsistenzprüfungs- und Erstellungsaufwand
- Keine Unterstützung durch 3D-Hardware / GPU
Vor- und Nachteile der Darstellungen nochmal überfliegen
Dreiecksnetze
Vorteile von Dreiecken
- kann in jede gewölbte Oberfläche eingebettet werden (siehe vier Tischbeine) oder umgekehrt: Dreiecke sind stets planar
- stets konvex
- parametrisierbar (siehe Baryzentrische Koordinaten)
- GPU-unterstützt
Tesselation:
- Dreieck in durch Punkt im inneren in drei neue Dreiecke zerlegen inkrementelle Modellierungs-Verfeinerung (z.B. Kugeloberfläche)
- alternative Strategie: über Mittelpunkte der Kanten vier neue Dreiecke
Triangulierung
Zerlegen einer gegebenen Oberfläche in ein Dreiecksnetz
- exakt gleich bei polygonalen Oberflächen
- Approximation bei nicht-polygonalen Oberflächen (z.B. implizit definiert, parametrische / analytisch) einstellbar
Trivialer Algorithmus für konvexe Polynome:
- beliebiger Eckpunkt als Ankerpunkt
- Dreiecke werden durch jede Diagonale von dem Ankerpunkt zu allen anderen nicht-benachbarten Eckpunkte hergeleitet
- Laufzeit
Monotone Polygone:
- Punkte werden in einer doppelt verketteten Liste nach ihrem -Wert (bzw. ) absteigend sortiert
- Eckpunkte des linke / rechten Teil des Polygonzuges werden zusammengefasst
- Laufzeit | mittels Stack
Einfache Polygone:
- Jedes einfache Polygon mit Ecken besitzt eine Triangulierung mit Dreiecken und Diagonalen
- jedes einfache Polygon besitzt strikt konvexe Ecke (Innenwinkel ) und damit auch eine Diagonale im Inneren
- ähnliche große und gleichmäßige Polygone insbesondere für Beleuchtung wünschenswert (Berechnung nur an den Eckpunkten)
- Ear-Cutting
Ear Cutting
- Jedes einfache Polygon mit mindestens 4 Ecken hat mindestens zwei Ohren, d. h. Dreiecke, bei den zwei Kanten den Polygonkanten entsprechen
- Cutting-Ear-Algorithmen suchen solche Ohren zu einem Eingabepolygon, entfernen das Ohr und arbeiten rekursiv auf dem verbleibenden Teilpolygon weiter, bis nur noch ein Dreieck übrig ist
- Laufzeit | trivial und rekursiv zu Programmieren
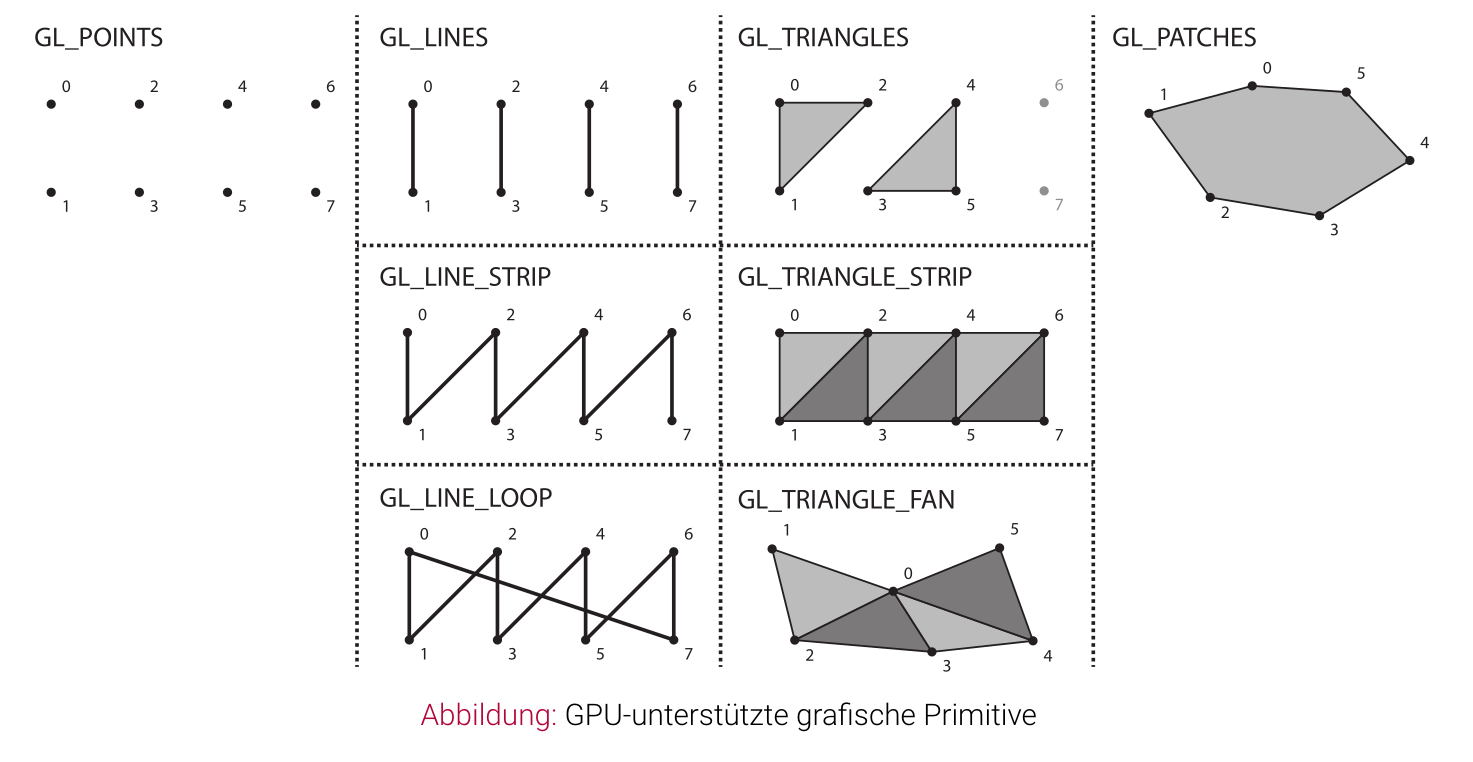
Graphische Primitive
OpenGL
GL_POINTS(heutige Verwendung vorrangig für Laser-Scans)GL_LINESGL_LINE_STRIPGL_LINE_LOOP
GL_TRIANGLESGL_TRIANGLE_STRIP(letzte drei Vertices)GL_TRIANGLE_FAN(erste Vertex + letzte beiden Vertices)
GL_PATCHES
Triangle Strips & Triangle Fans
- Strips können über degenerierte Dreiecke (doppelter Index) zusammengefügt werden
- Primitive Restart: Statt degenerierter Dreiecke kann auch der maximale Index (
0xFFFF, 65535) als Steuerelement eingefügt werden
Triangle Stripification
Ziel: Möglichst kleine Anzahl von möglichst großen Streifen, die insgesamt die Oberfläche vollständig und redundanzfrei darstellen
- Algorithmen greedy oder auf Grundlage eines Oberflächengraphs und dessen Analyse
Höhenfelder
- Höhenfeld ist gegeben durch entweder eine stetige, reelwertige Funktion oder ein reguläres mit Höhenwerten an den Gitterpunkten
- Triviale Triangulierung besteht darin, zu einem Zeilenabstand (Gitterabstand) jeweils einen Dreiecksstreifen zu bilden
- Adaptive Triangulierung erzeugt dort mehr Dreiecke (höhere Auflösung), wo eine stärkere Formveränderung vorliegt
- Level-of-Detail-Triangulierungen erzeugen Triangulierungen mit unterschiedlicher Auflösung
- z.B. Quadtree (sichtabhängiges LoD)
- “2,5-dimensional”, denn nur ein Höhenwert je -Koordinate erlaubt
Triangulierung regulärer Gitter
Wahl der Diagonale je Gitterzelle zum Beispiel nach folgenden Kriterien:
- möglichst große Normalenwinkel-Unterschiede
- möglichst flächengleiche Dreiecke
- Diagonale zwischen Eckpunkten auf möglichst gleicher Höhe
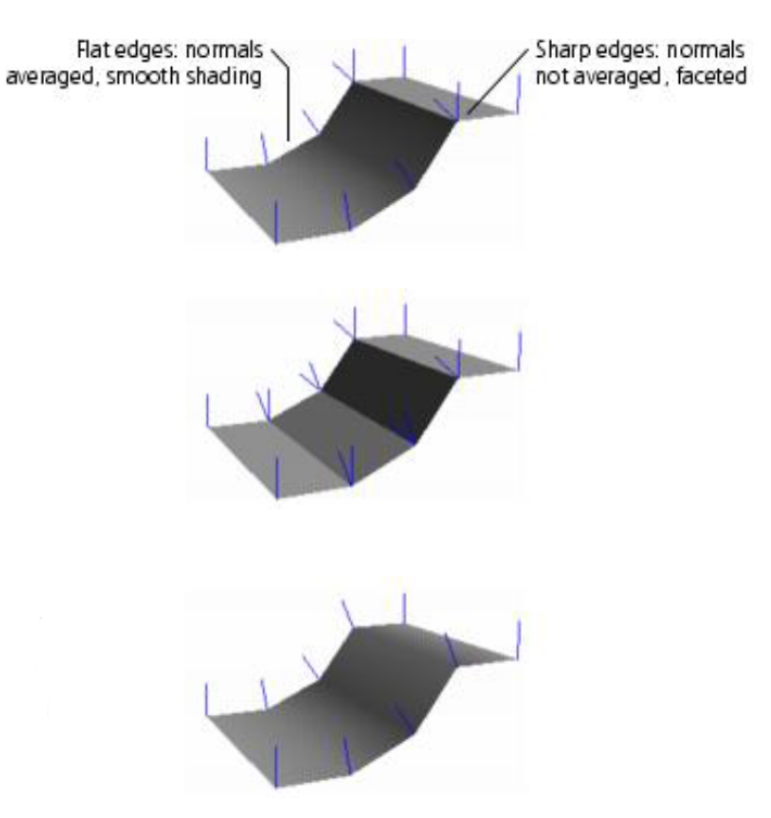
Oberflächennormale
Polygon / Facid Normals sind den Flächen zugeordnet
- werden für Ausrichtung der Fläche (Front-Facing / Back-Facing) verwendet
Vertex Normals sind den Punkten zugeordnet
- werden für Shader (z.B. Beleuchtung und Schattierung) verwendet
- smooth shading: benachbarte Polygone haben dieselben Normalen an den Eckpunken (z.B. Mittelwert der anliegenden Facid Normals)
- hard shading: ab z.B. 15° wird harte Kante erkannt demselben Eckpunkt werden in verschiedenen Polygonen verschiedene Normalen zugewiesen
- Smoothing groups: lokal glatte Flächenstücke mit (anschließender Berechnung von) gemeinsam genutzten Normalen
Normalenberechnung
Können bereits gegeben sein:
- explizit im Polygonnetz enthalten (ggf. manuell modeliert)
- implizit aus der Polygondarstellung berechenbar
- implizit aus ursprünglicher (nicht-polygonalen) Objektform herleitbar (z.B. Zylindermantel)
Allgemeine Berechnung über die Ebenengleichung der Ebene, in der das Polygon liegt
- Auswahl dreier Punkte des Polygons
- Normalenberechnung durch , d.h.
- Problematisch: Berechnung bei fast planaren Polygonen
- Auswahl von 3 Punkten ist i. Allg. kritisch (z. B. koplanare Punkte, numerische Ungenauigkeiten)
- Berücksichtigung aller Koordinaten eines Polygons sinnvoll
Lösungsansätze: Numerische Genauigkeit ist ein generelles Problem bei der Berechnung von Polygonnormalen
- Umstellung der Berechnung:
- Berechnung konsekutiver Kanten und Mittelung der resultierenden Normalen
- Auswahverfahren:
Repeat k times
Pick 3 random polygon vertices
Calculate the normal of the according triangle
Choose the longest normal as the polygon's normal / discard those with length < epsilon
Weitere Probleme
Konsistente Orientierung: Polygone im Polygonnetz müssen konsistent orientiert sein, damit die implizit definierten Polygonnormalen einheitlich nach außen oder innen zeigen
- Grundproblem bei Polygon Soups
Folgen fehlerhafter Polygonberechnung:
- Inkonsistente Orientierung benachbarter Polygone (Innen- und Außenflächen sind inkonsistent)
- Überlappende Polygone (Modellfehler, Rendering-Artefakte)
- Nichtintendierte Löcher (holes – Modellfehler, Rendering-Artefakte)
- Brüche (cracks)
- T-Verbindungen (T-junctions)
- Degenerierte Polygone (degenerated polygons)
- etc.